






Wen-Bo Li insinyur mesin dari Universitas Shanghai Jiao Tong di Cina mengeksplorasi bagaimana merancang robot lunak yang bergerak dengan berguling berdasarkan inspirasi dari gerakan udang mantis di pantai.
Li mendapati bahwa udang mantis bisa bergerak jungkir balik sejauh 2 meter. Dengan melakukan 20 hingga 40 gulungan dinamis berturut-turut, bahkan bisa melakukannya di tanjakan.
Setelah mengetahui mekanisme yang menarik ini Li mulai merancang robot lunak untuk meniru gerakan jungkir balik si udang . Bersama timnya mereka membuat tubuh robot dalam serangkaian segmen, mirip dengan udang mantis. Mereka menggunakan 11 rung gerak dengan bentuk yang sama dengan permukaan punggung hewan. Hal itu membuatnya stabil.
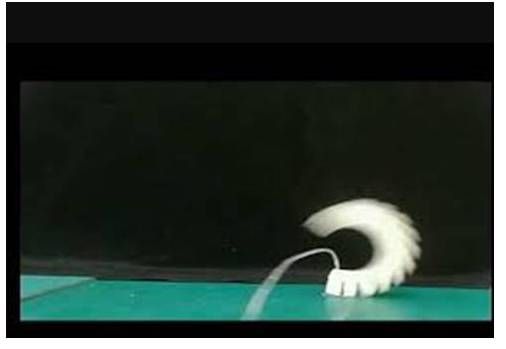
Sebelum bergerak, robot --- disebut SomBot --- terentang lurus. Tindakan suction-cup menahannya ke lantai. Saat para peneliti mendorong udara melalui tabung tipis panjang yang menempel di salah satu ujungnya, isapnya terlepas. Hal ini menyebabkan tubuh robot menekuk menjadi lingkaran dan berguling.
Robot lunak versus robot keras
Seorang insinyur lain, Daniela Rus dari Massachusetts Institute of Technology di Cambridge juga merancang robot ikan lunak bernama SoFi. Robot yang biasanya bertubuh keras dari bahan seperti plastik keras dan logam bisa melukai orang di sekitarnya. Karena itu banyak desainer robot lebih memilih bahan yang lebih lembut selain itu robot-robot itu akan lebih mendekati organisme nyata yang lembut.
Insinyur sering memilih robot lunak untuk misi di mana mereka perlu melindungi organisme lunak di sekitar mereka --- seperti manusia atau hewan lain. teknologi baru ini tidak hanya lebih aman tetapi juga lebih mampu melakukan berbagai gerakan daripada robot berbadan keras.
Untuk robot barunya, tim Shanghai menggunakan elastomer. Ini adalah polimer --- bahan yang terbuat dari rantai panjang unit berulang. Elastomer karet yang sama terkadang digunakan pada sol sepatu dan ban mobil. Setelah dibentuk menjadi bentuk yang diinginkan, tetap elastis. Fleksibilitas itu, harus memungkinkannya menahan beban dan bergerak sesuai kebutuhan.
Kebutuhan akan Kecepatan
Kelompok Li telah memulai dengan satu tujuan besar: membuat SomBot lebih cepat dari jenis robot lunak sebelumnya. Tindakan jungkir baliknya tampaknya telah membantu mereka berhasil. Tim menguji kecepatan SomBot melawan robot kaku tapi lembut yang terinspirasi oleh tulang belakang cheetah. Robot berguling lembut itu terlihat seperti ulat. Itu dirancang untuk bergerak seperti jari manusia. SomBot mengalahkannya dengan lebih dari tiga panjang tubuh per detik.
