
Bidang robotika sangat bergantung pada motor DC, yang dipasang sebagai penggerak atau roda untuk berbagai sistem robotik. Kurangnya catu daya DC yang kompatibel dengan karakteristik motor DC jenis ini, mencegah motor berputar secara mekanis. Untuk membuat motor DC berputar, Anda perlu mengaktifkannya dengan sakelar.
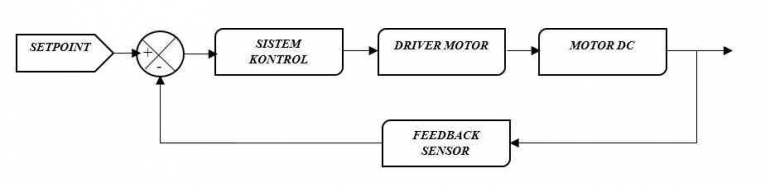
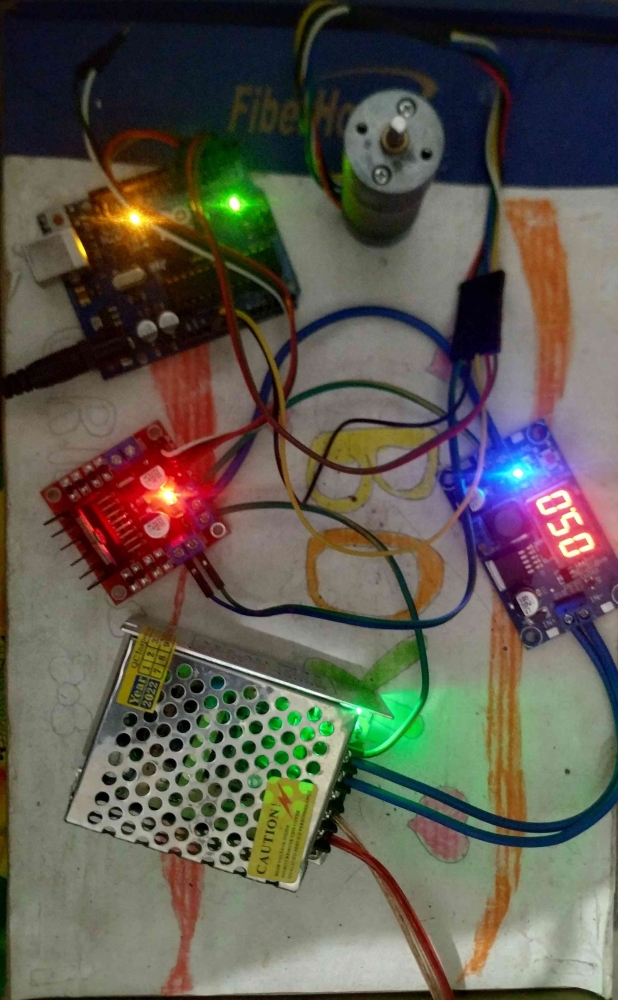
Keterbatasan putaran motor DC yang disebabkan oleh beban yang mempengaruhi perubahan kecepatan dapat dikurangi dengan adanya sistem kontrol motor DC. Agar motor DC dapat menghasilkan torsi yang besar, rangkaian tambahan yang disebut driver motor harus ada sebelum sistem kontrol dapat mengeluarkan perintah ke motor. Arduino Uno digunakan sebagai otak dari sistem kontrol karena merupakan platform mikrokontroler yang paling sering dijumpai oleh para pelajar dan berbasis perangkat lunak open source. Driver motor yang digunakan adalah jenis L298N; fungsinya mirip dengan sakelar yang mendeteksi arah yang diinginkan motor DC dan berusaha untuk memasok daya yang cukup.
Untuk meninjau, konteks sistem kontrol memerlukan penyertaan teknik kontrol seperti PID atau logika fuzzy agar dapat berfungsi secara efektif. Diskusi akhirnya mengarah ke PID, karena metode kontrol ini dapat diterapkan pada motor DC dalam pengaturan sistem tertutup. Manfaat utama PID adalah dapat mengurangi atau bahkan menghilangkan penundaan dalam respons sistem. Kp, Ki, dan Kd adalah tiga parameter konstan pengontrol PID yang harus disetel dengan baik melalui uji coba atau metode Ziegler-Nichols.
Menetapkan titik setel dan kemudian menjalankan sistem kontrol berdasarkan metode kontrol PID menyebabkan driver motor mengarahkan motor DC dengan cara yang memunculkan sinyal umpan balik dari sensor enkoder. respons sistem, menyesuaikan efek konstanta PID sangat penting. nilai kesalahan dihitung dengan membandingkan nilai aktual dengan nilai yang ditetapkan; nilai ini diumpankan kembali ke dalam sistem kontrol, di mana ia diproses hingga respons sistem yang diinginkan tercapai. sekarang, di sini, dalam bentuk yang tepat.